

2017年12月7-9日,首期“RoboMaker”智能机器人创客教师培训在北京航空航天大学举办。来自全国各地的高校和中小学创客教师50余人齐聚一堂,共同参加此次创客教师培训。本次培训班由国际机器人竞技与创客教育联盟(以下简称“联盟”)主办,北京威米文化有限公司承办,北京博创尚和科技有限公司提供技术支持。国际机器人竞技与创客教育联盟主席、人工智能学会副理事长韩力群教授、清华大学张文增教授、联盟教育总监王立博士、北京航空航天大学陈阳博士等人出席了开班仪式。学院人力资源处派出自动化系副教授、省教育厅“青蓝工程”培养对象王志凌老师参加了这一培训。

培训合影
会议日程:
|
时间 |
主题 |
嘉宾、教师 |
|
|
第一天
|
09:00-09:30 |
开班典礼 |
全体人员 |
|
9:30-12:00 |
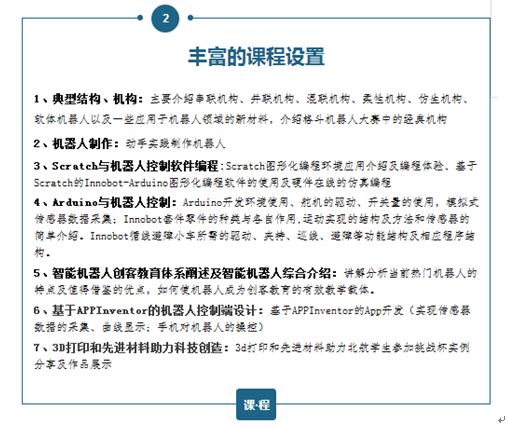
典型结构、机构主要介绍串联机构、 并联机构、 混联机构、 柔性机构、 仿生机构、 软体机器人以及一些应用于机器人领域的新材料,介绍格斗机器人大赛中的经典机构 |
张文增 |
|
|
13:30-14:30 |
机器人制作 |
王 立 |
|
|
14:30-17:30 |
Scratch 与机器人控制软件编程Scratch 图形化编程环境应用介绍及编程体验、基于 Scratch 的 Innobot-Arduino 图形化编程软件的使用及硬件在线的仿真编程 |
王 立 |
|
|
第二天 |
08:00-10:00 |
参观交流(清华等知名高校创客空间、机器人实验室等) |
培训项目组 |
|
10:00-11:30 |
人工智能概述 |
韩力群 |
|
|
13:00-15:00 |
Arduino 与机器人控制(一)Arduino 开发环境使用、舵机的驱动、开关量的使用,模拟式传感器数据采集; Innobot 套件零件的种类与各自作用,运动实现的结构及方法和传感器的简单介绍 |
候涛刚 |
|
|
15:00-18:00 |
Arduino 与机器人控制(二)Innobot 循线避障小车所需的驱动、夹持、巡线、避障等功能结构及相应程序结构。 |
候涛刚 |
|
|
第3天 |
8:00-10:00
|
基于 APPInventor 的机器人控制端设计 基于 APPInventor 的 App 开发(实现传感器数据的采集、曲线显示;手机对机器人的操控) |
陈 阳 |
|
10:00-12:30
|
智能机器人创客教育体系阐述热点智能机器人综合介绍讲解分析当前热门机器人的特点及值得借鉴的优点,如何使机器人成为创客教育的有效教学载体。 |
梁建宏 |
|
|
13:30-15:00
|
3d 打印和先进材料助力科技创造3d 打印和先进材料助力北航学生参加挑战杯实例分享及作品展示 |
梁建宏 |
|
本次培训班授课方式采用理论与实践相结合,并设置专家专题讲座、清华大学icenter工程训练中心及北京航空航天大学机器人实验室创客文化交流等环节,围绕着智能机器人、创客教育等方面与学员做深入的交流与探讨,从理论、动手实践、专业内涵、交流学习等层面多方位、多角度的阐释智能机器人创客教育,全面提升学员的综合素养。
本期培训班亮点突出,主要表现为四个方面:知名的讲师团队、丰富的课程设置、专家专题讲座、创客主题文化交流。


韩立群教授:国际机器人竞技与创客教育联盟理事长、教授,中国人工智能学会智能产品与产业工作委员会主任,原中国人工智能学会常务副理事长、中国计算机用户协会仿真应用分会副理事长。

清华大学工程训练中心是目前全球最大的校园创客空间,中心用创新实践活动为手段,让理工、人文、社会学科相融合,充分释放学生巨大的创新潜力,探索适合中国高校学生的培养模式,体现并提升了以“学生为主体、创新为驱动”育人理念。icenter形成以创意研讨与先进制造工坊为先锋,工程训练基地为基础,开放式创客工作室、跨学科研究室为引领的综合性创意创新创业教育与工程训练基地。
本次学习的收获及感想:
三天来的学习和交流虽然有些繁忙和疲惫,但是从中的收获也是颇丰的,感谢学院人力资源处给我这个学习交流的好机会。
1、课程学习的收获
(1)人工智能:韩教授《人工智能概述》专题报告,从人工智能的概念到人工智能的发展趋势,使我深刻解读了人工智能在未来科技及生活领域的重要性,人工智能将会成为未来社会学习、生活必不可少的一部分。
(2)工业机器人技术:清华大学张文增教授《工业机器人技术》专题报告,我从工业机器人技术意义、发展历史、分类组成、典型应用到工业机器人相关抓取技术、操作技术和移动技术等都有了一定认识,张教授还重点讲解了其在清华大学研究欠驱动机器人手技术的发展过程及成果,使我受益匪浅。
(3)智能机器人创客教育体系:在北京航空航天大学梁建宏教授《智能机器人创客教育体系》,深度理解了创客文化和大学对学生阶段目标的设置和各项能力及层次的划分,为我后续创客教师对学生培养指引的方向。梁教授《3D打印和先进材料助力科技创造》专题报告,使我对该技术有了进一步的了解和认识,打开了这方面学习和发展的思路。
(4)机器人制作和机器人控制软件编程:联盟教育总监王立博士讲授简单机器人制作,与机器人控制软件编程Scratch 图形化编程环境应用介绍及编程体验、基于 Scratch 的 Innobot-Arduino 图形化编程软件的使用及硬件在线的仿真编程。通过学习自己实际搭建了简单的机器人,基本掌握应用Scratch 图形化编程及硬件在线的仿真编程。
(5)Arduino与机器人控制:北京航空航天大学博士候涛刚讲授:(一)Arduino 开发环境使用、舵机的驱动、开关量的使用,模拟式传感器数据采集; Innobot 套件零件的种类与各自作用,运动实现的结构及方法和传感器的简单介绍。Arduino 与机器人控制(二)Innobot 循线避障小车所需的驱动、夹持、巡线、避障等功能结构及相应程序结构。通过学习自己掌握了各传感器编程应用。
(6)基于APPInventor 的机器人控制端设计:北京航空航天大学博士陈 阳讲授基于APPInventor的App开发。通过学习自己掌握了实现传感器数据的采集、曲线显示;手机对机器人的操控。




2、创客教育体系的认识
通过几天培训学习,使我对智能机器人创客教育体系有了一个较为清晰的认识,对学生大学期间的创客教育培养的目标设定和等级分类有了总体的设计和规划,这些都可以为金城学院以后在创客教育方面的发展提供思路和指导。
3、实验室建设及课程设置方面的体会
通过参观“清华大学基础工业训练中心”、“清华大学机电工程系”、“清华大学张文增教授工作室”及“北京航空航天大学各机器人实验室”。深刻感受我们与名牌大学对学生实践教学各方面的差距,后续我们可以把电子工业设计的思路引入到我们实验室建设和课程设置中,培养学生实际动手科研能力的培养。
(1)金城学院的机器人实验室的建设:在现今人工智能研究趋势阶段,需要加大金城学院机器人实验室的规划和建设,扩展研究领域,以教师研究牵引带动相关领域深入研究和发展。后期本人将继续进行相关机器人实验室建设项目的申报,希望为金城学院机器人教育事业发展贡献自己的力量。
(2)金城学院电子实训课程的改革:凸显电子类、信息类专业特色,真正锻炼学生动手科技制作练习,改变十多年来的装配万用表等简单操作,紧跟时代发展,学生自己设计(如电子狗、智能小车和MP3)电子电路,进行PCB板的加工、焊接调试及组装。



清华大学电子技术实验室

清华大学3D打印实验室
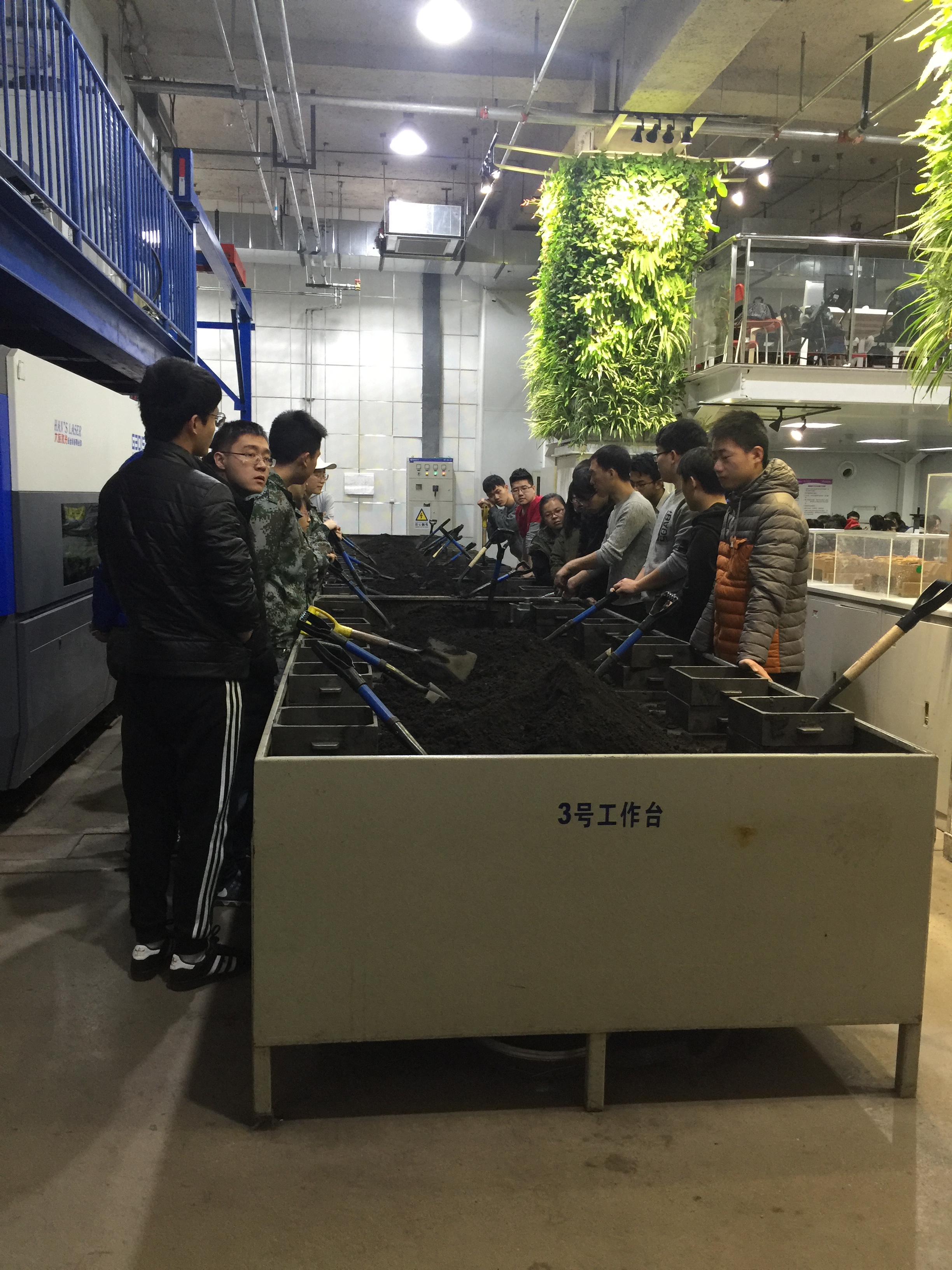



清华大学部分实训场地和张文增教授工作室
4、学生培养和科研方面的体会
作为一名教师,本次培训的最大收获就是自己在教学上和科研上的启发和灵感。清华大学张文增教授培养学生的“五个一:构思、创新、专利、论文和实物模型”,北京航空航天大学梁建宏教授的“各项能力和层次分化及学生目标培养”等教育方式都给我以启发,后续可以结合金城学生自身特点加以利用。科研方面,也找到一些自己感兴趣和想研究的机器人领域,如工业机器人、软体机器人,后续会进一步研究和实践。